不用tensorflow、pytorch等任何现有深度学习框架以及各种封装好的机器学习库,仅使用python语言及矩阵运算的库,从零开始实现一个全联接的神经网络。
任务描述
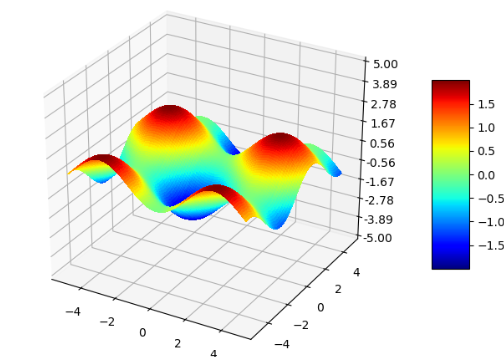
我们以一个回归任务为例,实现一个多层神经网络来拟合一个非线性函数$ y= \sin (x_{1})- \cos (x_{2}),x_{1} \in \left[ -5,5 \right] ,x_{2} \in \left[ -5,5 \right] $,函数图像如下图所示,输入层包含2个神经元,输出层包含1个神经元,隐藏层的数目和神经元数自定义,隐藏层采用ReLU作为激活函数,输出层用恒等函数做为激活函数,损失函数为均方误差(MSE)。
实际上我们实现的神经网络可以自定义输入输出大小、隐藏层结构、激活函数、损失函数等,因此用在其他任务上也是完全可以的。
准备工作
训练神经网络之前,我们需要先完成一些准备工作,包括生成训练和验证的数据集、定义用到的激活函数和损失函数。
数据集生成
在轴$x_1$和$x_2$的$[-5,5]$区间上每隔0.1均匀地对样本点进行采样,然后计算目标函数的值,生成100*100=10000个训练数据,转换成为numpy矩阵,作为训练数据集:
1 | # 生成训练数据集 |
另外随机采样并生成大小为1000的验证数据集:
1 | # 生成验证数据集 |
激活函数和损失函数
定义本次任务用到的数学函数,包括激活函数和损失函数:
激活函数
定义ActivationFunction类作为激活函数的基类,包括calculate(计算)和derivative(求导)两个抽象方法。本次任务中用到了ReLU和Pureline两种激活函数,若想使用其他激活函数可以仿照下面的形式定义(注意接受的参数x都是一个numpy矩阵)。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36import numpy as np
from abc import ABCMeta, abstractmethod
class ActivationFunction:
'''激活函数基类'''
__metaclass__ = ABCMeta
def calculate(self, x):
pass
def derivative(self, x):
pass
class ReLU(ActivationFunction):
'''relu激活函数'''
def calculate(self, x):
return np.maximum(x, 0)
def derivative(self, x):
return np.where(x > 0, 1, 0)
class Pureline(ActivationFunction):
'''恒等激活函数'''
def calculate(self, x):
return x
def derivative(self, x):
return np.ones(shape=x.shape)
MSE损失函数
假设样本个数为$n$,计算公式:$MSE=\frac{1}{n} \sum_{i=1}^{n}(y_{true}[i]-y_{pred}[i])^2$
1
2
3def mse_loss(y_true, y_pred):
'''MSE损失函数'''
return ((y_true - y_pred) ** 2).mean()
模型训练
数据结构定义和初始化
首先定义类NeuralNetwork表示神经网络类,初始化时用户向类构造函数传入参数input_size(输入层维度)、output_size(输出层维度)、hidden_size(隐藏层维度,用一个数组表示,如[5,3]表示两个隐藏层,分别包含5个和3个神经元),从而可以达到任意调整神经网络结构的目的。
接着定义两个数组self.w和self.b表示神经网络的权重和偏移量,每层的权重是一个numpy矩阵,用np.random.normal函数进行高斯分布初始化(设置均值为0,方差为0.1);同时定义一个数组self.activations表示每层的激活函数,这里隐藏层激活函数为ReLU,输出层激活函数为Pureline:
1 | # 随机初始化权重和偏移量 |
然后定义五个数组用于保存训练时的中间结果,均初始化为全0:
- self.z:每个神经元激活前的输出。
- self.a:每个神经元激活后的输出。
- self.delta:神经单元误差$\delta$,即loss对每个神经元激活前输出$z$的梯度(用于反向传播更新权重)。
- self.delta_w:权重w的累积更新值,用于处理完每个batch后更新权重。
- self.delta_b:权重b的累积更新值。
前向计算中间结果
每轮训练首先调用一个自定义的shuffle方法打乱训练样本集合。然后开始训练,设置训练轮数为30,batch_size为10,初始学习率为0.01。对每个输入样本,通过前向传播计算得到每层的输出self.z和self.a,如假设第$i$层($i>1$)的输入为$a[i-1]$,权重和偏移为$w[i]$和$b[i]$,则有:
$z[i]=a[i-1]\times w[i] + b[i]$,
$a[i]=activations[i].calculate(z[i])$
1 | def shuffle(x, y): |
反向传播计算梯度
接下来计算输出层(第-1层)的神经单元误差$\delta$,对于每个样本,假如输出层维度为$m$,损失函数$C=\frac{1}{m}\sum_{i=1}^{m}(y_{true}[i]-a[-1][i])^2$(本次任务中$m=1$),则$\delta[-1] = \frac{\partial C}{\partial z[-1]} = \frac{\partial C}{\partial a[-1]} \cdot \frac{\partial a[-1]}{\partial z[-1]}= \frac{1}{m} \cdot 2 \cdot (a[-1] - y_{true}) \cdot \theta’(z[-1])$,其中$\theta$为输出层的激活函数。
然后可以通过递推式反向计算出前面每层的神经单元误差,第$i$层的神经单元误差$\delta[i]=w[i+1] \times \delta[i+1] \times \theta’(z[i])$ ,其中$\theta$表示第$i$层的激活函数。
通过神经单元误差$\delta$我们可以计算出损失函数对w和b的导数,对第$i$层:$\frac{\partial C}{\partial w[i]} = a[i-1]^T \cdot \delta[i]$,$\frac{\partial C}{\partial b[i]}= \delta[i]$。并将导数累加结果记录在self.delta_w、self.delta_b数组中。
1 | # 计算最后一层的神经单元误差δ |
更新权重
每个batch结束后,更新w和b。对第i层:
$w[i] \leftarrow w[i]- lr \cdot \Delta w[i]$
$b[i] \leftarrow b[i]- lr \cdot \Delta b[i]$
1 | # 每个batch结束后更新w、b |
学习率衰减
这里采用了简单的学习率衰减方案,每过三轮学习率衰减为0.9倍。大家可以尝试其他衰减方案。
1 | if (epoch + 1) % 3 == 0: |
验证和可视化
每轮训练完成后调用validate方法验证模型在训练数据集和验证数据集上的损失,并绘制图像。
1 | def feedforward(self, x): |
拟合效果
增加隐藏层宽度对拟合效果的影响
设置神经网络只有一个隐藏层,考察隐藏层分别包含10、20、50、100个神经元时,训练集loss随训练轮数增加的变化情况(如下图)。(设置学习率为恒定值0.001,训练轮数为30轮)
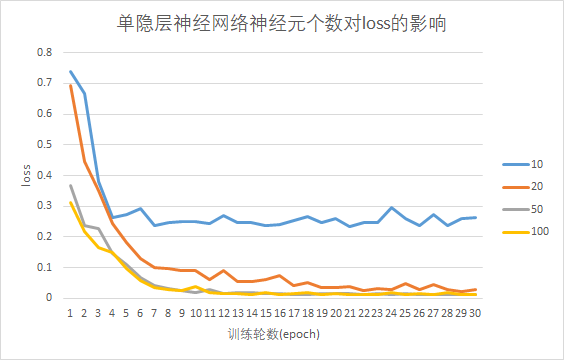
可见随着训练轮数增长,各个模型的训练集loss首先快速下降,接着缓慢下降。单隐藏层神经元个数越多,训练完成后的loss越低,说明增加神经元宽度能提升模型对目标函数的拟合能力。
增加隐藏层深度对拟合效果的影响
考察神经网络分别包含1、2、3、4个隐藏层,且每个隐藏层包含20个神经元时,训练集loss随训练轮数增加的变化情况(如下图)。(设置学习率为恒定值0.001,训练轮数为30轮)。
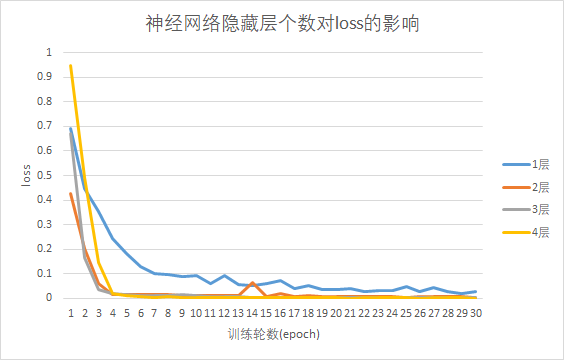
由图可见,神经网络层数越多,30轮训练结束后训练集的loss越低,说明层数越多,模型对目标函数的拟合能力越强。
最终效果
经过以上实验,我们验证了增加隐藏层的宽度和深度能减小拟合的误差。最后为了让拟合误差尽量小,经过多次尝试后,我们最终选择设置隐藏层个数为5,分别包含100、80、50、30、10个神经元,学习率衰减方案为每经过3轮训练,lr衰减为0.9倍。最终训练集loss为0.00015,验证集loss为0.00016。第0轮(训练前)、第1轮、第5轮、第30轮训练后的拟合结果可视化后如下图所示:

动图效果: