原文:DeepTest: Automated Testing of Deep-Neural-Network-driven Autonomous Cars (ICSE’18)
代码地址:https://github.com/ARiSE-Lab/deepTest
算法
神经元覆盖率计算方式:卷积层与DeepXplore有所不同,输出特征图的平均值与激活阈值做比较
9种图像变换方式:
- 线性变换:
- 亮度:所有像素值加/减一个常数
- 对比度:所有像素值乘以一个常数
- 仿射变换:平移、缩放、水平修剪、旋转 (模拟摄像头的移动)
- 卷积变换:
- 模糊(4种:averaging, Gaussian, median, and bilateral)
- 雾雨(Adobe Photoshop)
- 线性变换:
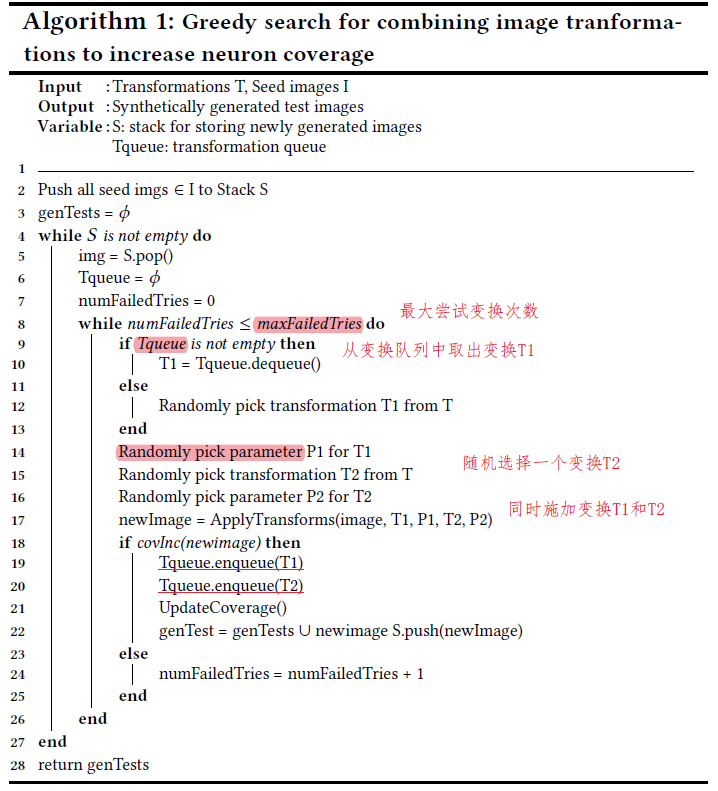
覆盖率引导的贪心搜索变换叠加算法
蜕变关系约束
对一张图片,蜕变后的预测角度$\theta_{ti}$与真实标记$θ_i$之间的差距应小于原始数据集平均MSE的λ倍
实验
数据集及模型
数据集:Driving
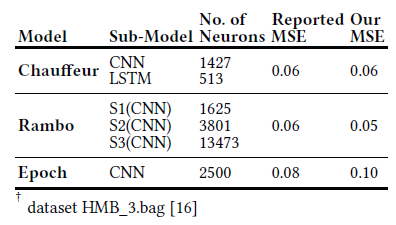
模型:Udacity比赛排名第2、3、6的模型Rambo、Chauffeur、Epoch
可控制参数或变量
maxFailedTries: 变换叠加时最大尝试次数
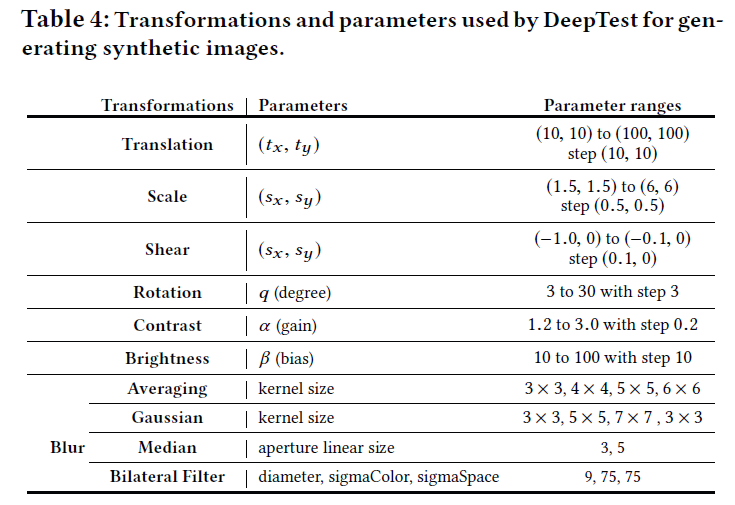
各变换参数及可选范围:
$\lambda$: 控制蜕变关系约束
$\epsilon$:控制变换约束大小
神经元激活值
实验1:不同输入输出对是否覆盖不同神经元
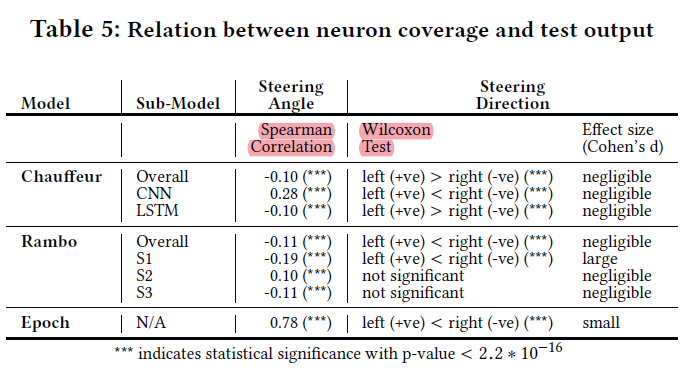
实验方法:检查不同模型覆盖率与驾驶方向的Spearman相关性、覆盖率与驾驶角度的Wilcoxon非参数检验结果。(该实验设计是否合理?覆盖率增加,应对应的是输入或输出种类增加而非角度增大??)
实验结果
- 随着神经元覆盖率的增加,转向角度增加,反之亦然。即不同输出对应不同的神经元,神经元覆盖率可以很好地近似估计输入输出对的多样性。(相关系数结果并不明显?)
- 神经元覆盖率随导向方向的变化具有统计学意义($p<2.2∗10^{−16}$时) ,有些子模型比其他子模型更负责改变方向。
- 总结:对于不同的输入输出对,神经元的覆盖范围很不同。因此,神经覆盖定向(NDG)测试策略可以帮助发现corner样本。
实验2:不同图像变换是否激活不同神经元
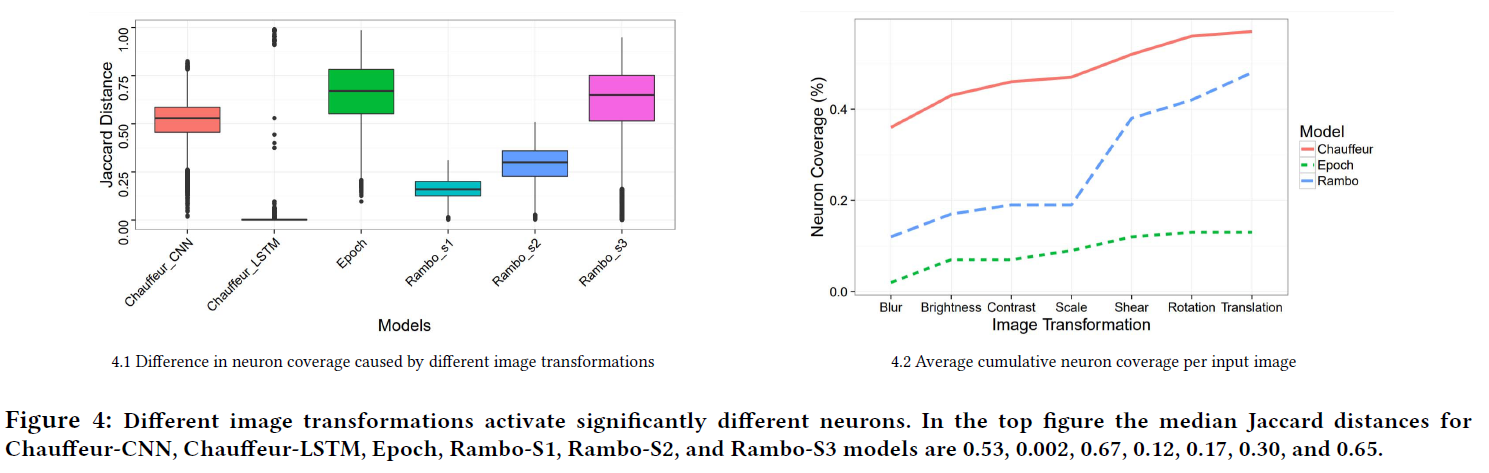
实验2-1:从测试集随机选择1000张图片,对每张图片分别做7种变换(blur, brightness, contrast, rotation, scale, shear, and translation)以及尝试变换的多种参数,得到共70000张生成图片。在各个模型上运行这些图片,记录神经元激活情况。对任意两种变换的组合(如模糊vs旋转,旋转vs平移等等),设激活神经元集合分别为N1、N2,测量二者的差异大小(Jaccard距离)
- 结果:(左图):除了Chauffeur_LTSM模型之外,不同的变换激活的神经元有较大区别
实验2-2:七种变换依次叠加在图片上,查看覆盖率提升情况
- 结果(右图):叠加每种变换后神经元覆盖率都增加了,说明每种变换都能激活不同神经元。(覆盖率提升是因为变换种类增多还是离原图距离越来越远?)
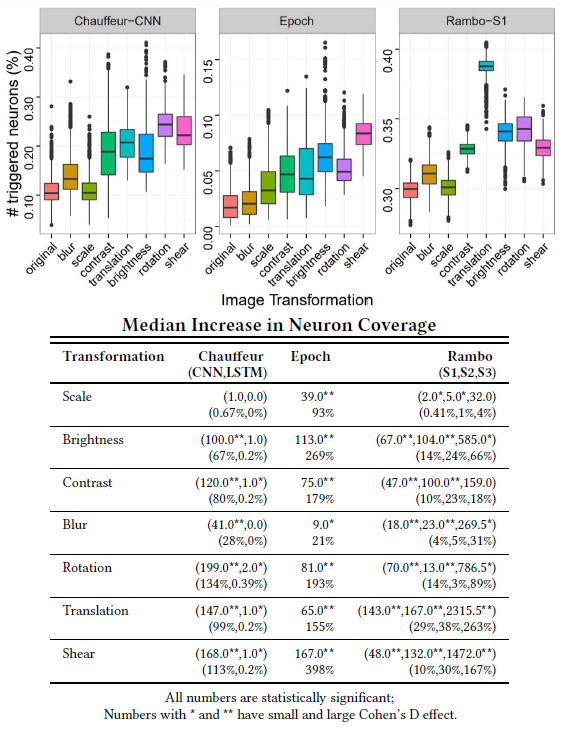
实验2-3:单个变换触发神经元的比例分布情况及平均神经元增加百分比情况
结果:不同的图像变换以不同程度增加神经元的覆盖率。(下表的两行没看懂)
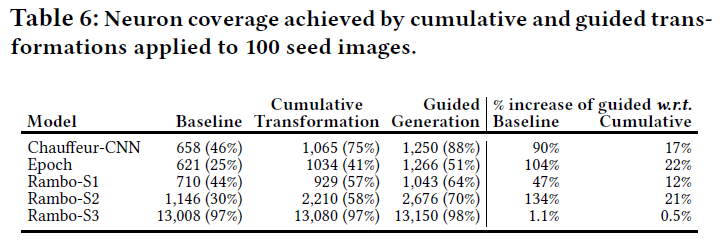
实验3:结合不同变换是否能进一步提升神经元覆盖率
实验方法:
- Baseline组:原始的100个种子输入
- 累积变换组:在100个种子输入上叠加7种变换的10种参数组合,得到7000张生成图片。
- 覆盖率引导的贪心搜索组:仅生成了254、221、864张图片(对应三个模型)
实验结果:通过系统地结合不同的图像变换,神经元的覆盖率比原始种子图像的覆盖率提高了约100%。
实验4:使用蜕变关系是否能检测到错误行为
实验4-1:生成图片与原图片和真实标记之间的偏差情况
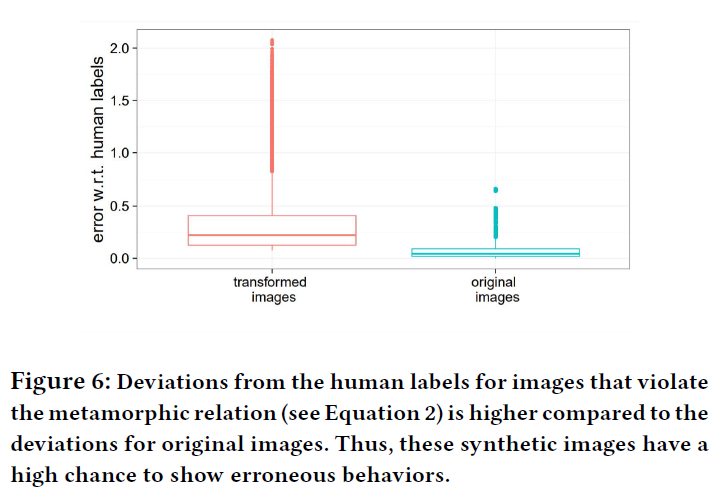
- 结果:生成图片集合的MSE为0.41,原图片集合为0.035。因此生成的图片更有可能触发错误行为
实验4-2:生成错误图片数量
实验方法:
约束:为了防止图片变化过大或误报出现(如旋转后旋转角度应跟着变化),使用的变换(除了雾、雨)及其参数必须满足:
(计算MSE用到了人工标记的oracle,在实际测试没有oracle时怎么办?)
实验结果:
λ越大、$\epsilon$越小,错误数量越少(总生成图片数量没说?)
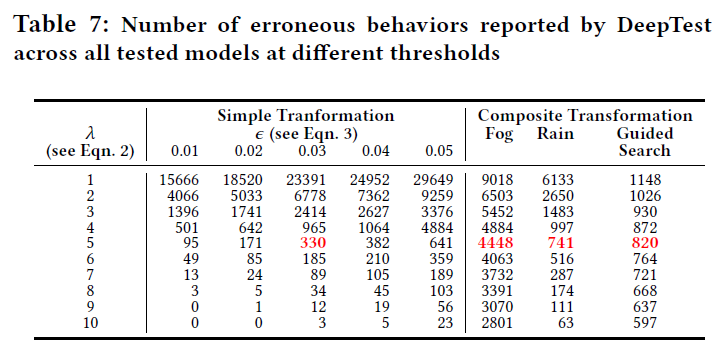
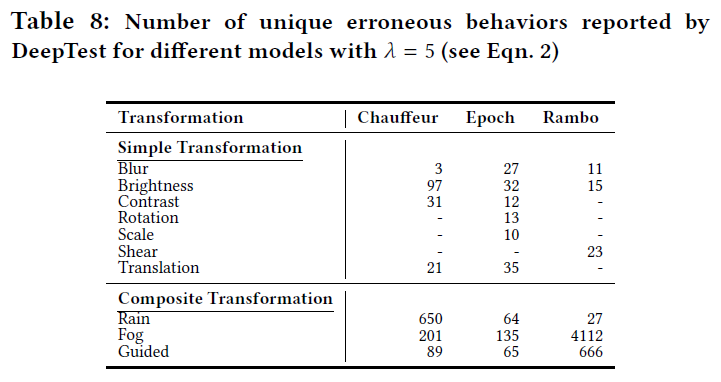
对于某些转换,有些模型比其他模型更容易出现错误行为。($\lambda=5,\epsilon=0.03$)
实验4-3:人工检查误报情况
- 结果:误报较少
实验5:使用生成图片重新训练DNN能否提高准确率
实验方法:用HMB_3的图片生成雾、雨图片,其中66%和原训练集一起重新训练Epoch模型,剩下34%做测试。(用的转换太少了)
实验结果:MSE降低。